
An integrated, fully differential amplifier is similar in architecture to a standard, voltage-feedback op amp (Figure 2). Both types of amplifiers have differential inputs. A standard op amp’s output is single- ended, but a fully differential amplifier has differential outputs. Fully differential amplifiers offer the ability to control the output common-mode voltage independently of the differential voltage. The purpose of the VOCM input in the fully differential amplifier is to set the output common-mode voltage. In a standard op amp with a single-ended output, the output common-mode voltage and the output signal are the same. In a standard op amp, one feedback path typically goes from the output to the negative input. In a fully differential amplifier, multiple feedback paths exist. Table 1 lists some important voltage definitions.


AMPS REJECT COMMON-MODE VOLTAGES
Figure 3 shows a simplified version of an integrated, fully differential amplifier. Q1 and Q2 are the input differential pair. A standard op amp takes output current from only one side of the input differential pair to develop a single-ended output voltage. A fully differential amplifier uses currents from both sides to develop voltages at the high-impedance nodes formed at the collectors of Q3/Q5 and Q4/Q6.The IC then buffers these voltages to produce the differential outputs OUT1 and OUT2. To a first-order approximation, voltage common to IN+ and IN- produces no change in the current flow through Q1 or Q2 and thus produces no output voltage. Thus, the amplifier rejects common-mode voltages. The input does not control the output common mode voltage. Instead, the VOCM error amplifier maintains the output common-mode voltage at the same voltage as the VOCM pin by sampling the output common-mode voltage, comparing it with the voltage at VOCM, and adjusting the internal feedback. If the external circuit leaves VOCM disconnected, the IC biases VOCM to the midpoint between VCC and VEE using an internal voltage divider. Due to the change in phase between the differential outputs, the dynamic range is twice that of a single-ended output with the same voltage swing (Figure 1b). The two complementary amplifier paths in Figure 3 share the same input differential pair, and their characteristics are well-matched. With symmetrical feedback, the architecture keeps the operating points close to each other. Therefore, distortion in the amplifiers is closely matched, resulting in symmetrical distortion of the differential signal. Symmetrical distortions tend to cancel even-order harmonics. Lab testing of the Texas Instruments THS4141 differential amplifier at 1 MHz shows that the second harmonic at the output decreases by approximately 6 dB when measuring the signal differentially compared with measuring either output single-ended. The third harmonic remains unchanged between a differential and single-ended measurement.

STUDY BASIC CIRCUITS
In a fully differential amplifier, two feedback paths, one for each side, are possible in the main differential amplifier. This arrangement naturally forms two inverting amplifiers, and you can easily adapt inverting topologies to fully differential amplifiers. Figure 4a shows how to configure a fully differential amplifier with negative feedback to control the gain and maintain a balanced amplifier. Symmetry in the two feedback paths is important to have good CMRR performance. CMRR is directly proportional to the resistor-matching error, and an error of 0.1% results in 60 dB of CMRR.
The VOCM error amplifier is independent of the main differential amplifier. The purpose of the VOCM error amplifier is to maintain the output common-mode voltage at the same level as the voltage input to the VOCM pin. With symmetrical feedback, output balance is maintained, and VOUT+ and VOUT- swing symmetrically plus and minus from the voltage at the VOCM input.
In the past, generating differential signals has been cumbersome. Designers have used different means, often requiring multiple amplifiers. The integrated fully differential amplifier provides a more elegant solution. Figure 4b shows an example of converting single ended signals to differential signals.

TERMINATE THE INPUT SOURCE
High-speed systems typically use double termination to reduce reflections in the transmission lines. Double termination implies that you terminate the transmission line with the same impedance as the source. Common values are 50, 75, and 100V.When the source is differential, the termination is across the line. When the source is single-ended, the termination is from the line to ground. The differential situation is balanced and raises no further design issues. The single- ended situation is not balanced and needs further attention if a balanced system, where b1=b2 is desirable. b1 and b2 are the VOUT1 and VOUT2 feedback-resistor ratios, and for a balanced amplifier b1=b2=RG/(RG+RF) (Figure 5). Figure 5a shows the source and termination resistors for a single-ended signal. To calculate the feedback factor, short the source. Figure 5b shows that the source impedance, RS, and termination resistor, RT, add to the calculation of the feedback from VOUT2 to the positive input. To balance the amplifier, a resistor equal to RS||RT is necessary in the upper feedback path (Figure 5c). Given that RT5RS, then RS||RT=RT/2.
Typical applications of fully differential amplifiers include driving ADC inputs and transmission lines. For the circuits that follow and any related equations, you can assume that the amplifier is operating at frequencies for which a(f)>>1. Thus, the following equations do not include a(f) and its effects. Also, assume that the feedback is symmetrical, or that b1=b2=RG/(RG+RF).

DRIVE AND FILTER ADC INPUTS
A major application for fully differential amplifiers is lowpass, antialias filters for signal-conditioning ADCs with differential inputs. You can easily create an active, first-order, lowpass filter by adding capacitors in the feedback paths (Figure 6a).With balanced feedback, the transfer function is:

The pole in the transfer function is a real pole on the negative real axis in the s-plane. Note that, for this circuit and all others that follow, each power pin should have a 6.8- to 10-µF tantalum capacitor in parallel with a nearby 0.01- to 0.1-µF ceramic capacitor. These circuits show bypass capacitors of 10 and 0.1 µF.
To create a two-pole, lowpass filter, you can add another passive real pole by placing RO and CO in the output (Figure 6b). With balanced feedback, the transfer function is:

The second pole in the transfer function is also a real pole on the negative real axis in the s-plane.

The classic filter types, such as Butterworth, Bessel, and Chebyshev filters (second-order and greater) are unrealizable using real poles and require complex poles. The MFB (multiple feedback) is a good topology with which to create a complex pole pair and is easily adaptable to fully differential amplifiers (Figure 7). Adding the two R4 resistors and C3 at the output forms a third-order filter.

The transfer function for this filter circuit is:

K sets the passband gain, fC is the filter cutoff frequency, FSF is a frequency-scaling factor, and Q is the quality factor, where Re is the real part, and Im is the imaginary part of the complex pole pair:

and

To design the filter, you start by determining the ratios, m and n, necessary for the gain and Q of the filter type. Then you select C and calculate R for the desired fC. Choose R4 and C3 to set the real pole in a third-order filter.
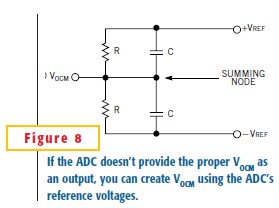
Most ADCs with differential inputs provide the proper VOCM as an output. Typically, all you have to do is provide bypass capacitors; 0.1- and 0.01-µF capacitors are useful choices. If the ADC doesn’t provide VOCM, you can create it by forming a summing node using the ADC’s plus and minus reference voltages to drive the amplifier’s VOCM pin (Figure 8). The voltage at the summing node is the midpoint value between +VREF and -VREF.
POSITIVE FEEDBACK FOR ACTIVE TERMINATION
Driving transmission lines differentially is a typical use for fully differential amplifiers. By using positive feedback, the amplifiers can provide active termination (Figure 9). The positive feedback makes the output resistor appear to be a larger value than it actually is when you view it from the line. Still, the voltage dropped across the resistor depends on the actual resistor value. Thus, active termination provides for increased efficiency. Note that it is important to use symmetrical feedback with this application.
For proper termination, the output impedance of the amplifier, ZO, should equal the characteristic impedance of the transmission line, and the far end of the line will terminate with the same value resistor, so RT=ZO. To calculate the out-put impedance, ground the inputs, insert either a voltage or a current source between VOUT+ and VOUT-, and calculate the impedance from the circuit’s response. Due to symmetry, ZO+=ZO-, VOUT+=-VOUT-, and VO+=-VO-. Calculation of the impedance of one side provides the solution:
Looking back into the amplifier’s outputs, the impedance that each side of the line sees will be the value of RO divided by 1 minus the gain from the other side of the line, or

The value of ZO is two times this result.
The positive feedback also affects the forward gain. Accounting for this effect and the voltage divider between RO and RT||2RP the gain, A, from VID to VOD is:
You can easily accomplish the design by first choosing the value of RF and RO. Then, calculate the required value of RP to give the desired ZO. Then, calculate RG for the required gain.
For example, given that you want a gain of 1 and to properly terminate a 100W line with RF=1 kW and RO=10W. The proper value for ZO and RT is 100W (ZO+=50V). Rearranging Equation 13 gives:

Then, rearranging Equation 14 gives:


Mr. Indiana I really congrats you for your posts! Its hard to find theory about fully differential, I just have a doubt about the table you show for the voltages definitions, for Input Common-Mode Voltage it should be a (v+ + v-)/2 instead of (v+ - v-)/2?
ResponderEliminar